Tomography, which is derived from the Greek word “tomos” that is “slice”, denotes
forming an image of an object from measurements made from slices or rays through
it. In other words, forming the structure of an object based on a collection of slices
through it.
In principle, it is usually an inverse problem where we have the data, we formulate the
geometry of the ray paths and invert for the model parameters that defines the
structure.
d = Gm
where, d is the vector containing the data, m is the vector containing the model
parameters and G is the kernel which maps the data into the model and vice-versa.
If there are N number of data and M number of model parameters then the size of the
matrix G is M×N.
The first step of this problem is to formulate a theoretical relationship between the
data and model spaces and the underlying physics. Once, this theoretical relationship
is established or the matrix G is formulated, we can address the above problem in two
ways – a forward problem or an inverse problem.
The forward problem can be taken as a trial and error process or as an exhaustive
search through the model space for the best set of model parameters which can reduce
the misfit between the observed and the predicted data. For this case, we guess the
model based on the simple real world geology and then determine the data based on
the theoretical relationship between data and models. In contrast, in the inverse
problem we invert for the model parameters using the data and considering the
theoretical relationship between the data and model parameters. Then we interpret for
the real world geology.
The solution of the linear tomographic inverse problem depends on the relationship
between Nand M. If N < M, then we have more number of model parameters or
variables to obtained and lesser number of data or equations to solve. In this case, the
equation d = Gm does not provide enough information to determine uniquely all the
model parameters and thus the problem is called underdetermined. We usually need
extra constraints to solve this kind of problem, for example we take the a priori
constraint that the solution to this problem is simple. If N = M, then there is ideally
enough information to determine the model parameters. But in real world, data is
usually inaccurate and inconsistent to invert for the best model parameters in this
case. If N > M, there is too much information contained in the equation d = Gm for
it to possess an exact solution. This case is called the overdetermined.
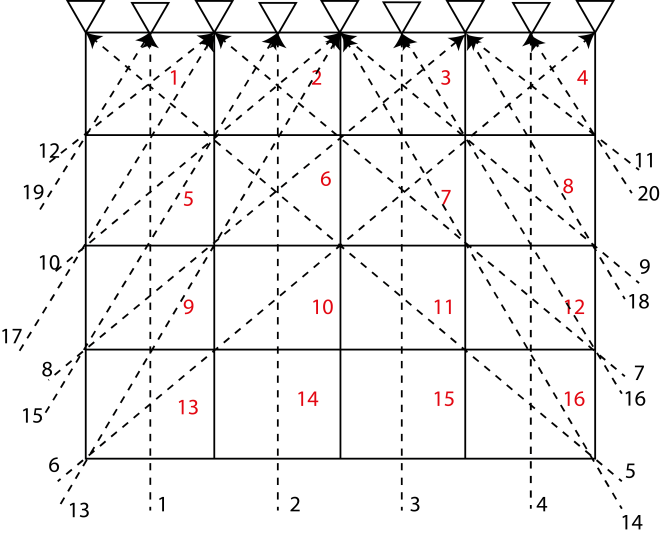
Overdetermined Problem
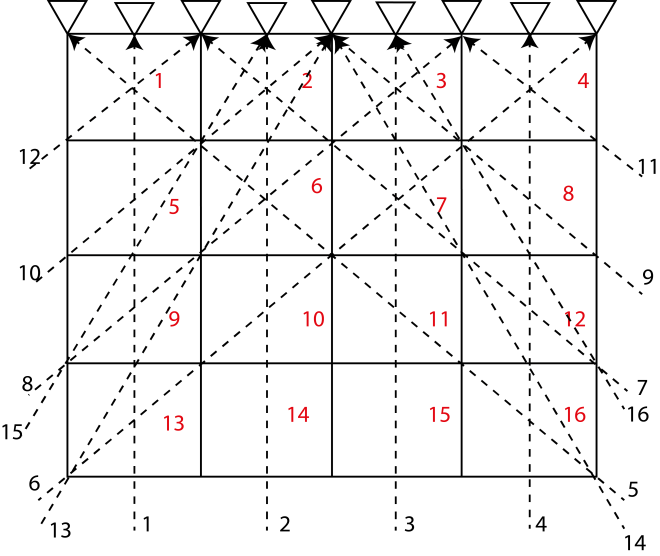
Equal – Determined Problem
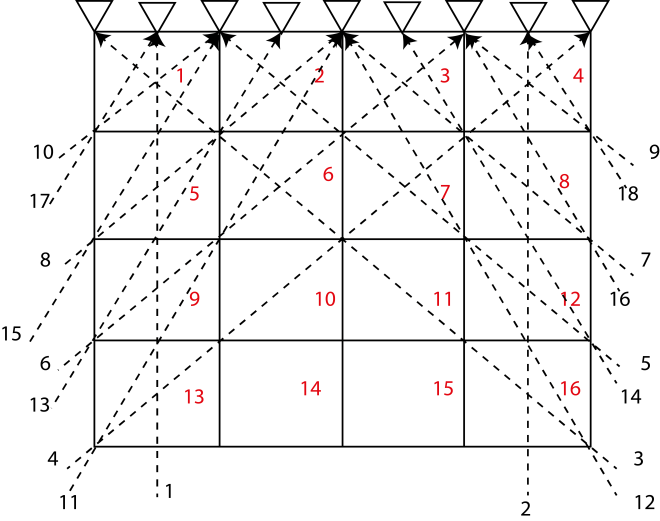
Mixed-Determined Problem
